Base class for all fitting classes. More...
#include <Fit.hpp>
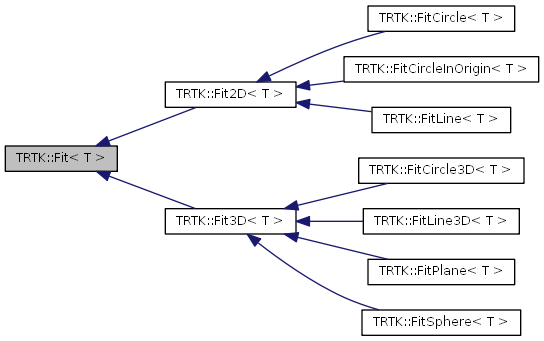
 Inheritance diagram for TRTK::Fit< T >:
Inheritance diagram for TRTK::Fit< T >:Public Types | |
| enum | Error { DATA_POINTS_TOO_SIMILAR, INFINITY_NOT_AVAILABLE, NAN_NOT_AVAILABLE, NOT_ENOUGH_POINTS, UNKNOWN_ERROR, WRONG_POINT_SIZE } |
|
typedef Eigen::Array< T, Eigen::Dynamic, 1 > | ArrayXT |
| General-purpose array of arbitrary size with value type T. | |
|
typedef Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | MatrixXT |
| Matrix of arbitrary size with value type T. | |
|
typedef Eigen::Matrix< T, Eigen::Dynamic, 1 > | VectorXT |
| Column vector of arbitrary size with value type T. | |
| typedef Eigen::Matrix< T, 2, 1 > | Vector2T |
| 2D column vector with value type T. | |
| typedef Eigen::Matrix< T, 3, 1 > | Vector3T |
| 3D column vector with value type T. | |
| typedef Eigen::Matrix< T, 4, 1 > | Vector4T |
| 4D column vector with value type T. | |
| typedef Eigen::Matrix< T, 2, 2 > | Matrix2T |
| 2 x 2 matrix with value type T. | |
| typedef Eigen::Matrix< T, 3, 3 > | Matrix3T |
| 3 x 3 matrix with value type T. | |
Public Member Functions | |
| virtual | ~Fit () |
| Destructor. | |
| virtual void | compute ()=0 |
| Performs the regression analysis. | |
| virtual T | getDistanceTo (const Coordinate< T > &point) const =0 |
| Returns the distance/deviation of the given data point to the estimated model. | |
| virtual T | getRMS () const =0 |
| Returns the root mean square error of the model fitting. | |
| virtual unsigned | getNumberPointsRequired () const =0 |
| Returns the minimum number of data points required to compute a model. | |
| virtual void | setPoints (const std::vector< Coordinate< T > > &)=0 |
| Sets the data point set. | |
Public Attributes | |
|
EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef T | value_type |
| Internally used value type (should be a floating point type). | |
Base class for all fitting classes.
| T | floating point type |
Every fitting algorithm must provide the method setPoints() with which the data points can be passed. In general, a model is only computed by calling the member function compute(). Bear that in mind before calling the getter functions. After having estimated the regression model, the estimation error can be determined by getRMS(). The minimum number of points needed to be able to compute a model is given by getMinimumNumberOfPoints().
Definition at line 53 of file Fit.hpp.
| enum TRTK::Fit::Error |
Documentation generated by Doxygen