Base class for 3D transformation estimations from two point sets.
More...
#include <EstimateTransformation3D.hpp>
List of all members.
Detailed Description
template<class T>
class TRTK::EstimateTransformation3D< T >
Base class for 3D transformation estimations from two point sets.
- Note:
- Some functions might throw an error object. See the appropriate function for more details.
- See also:
- EstimateTransformation
- Author:
- Christoph Haenisch
- Version:
- 0.1.1
- Date:
- 2011-08-05
Definition at line 54 of file EstimateTransformation3D.hpp.
Member Enumeration Documentation
- Enumerator:
| NOT_ENOUGH_POINTS |
More points are required to estimate the transformation.
|
| UNEQUAL_NUMBER_OF_POINTS |
The two point sets do not have the same cardinality.
|
| UNKNOWN_ERROR |
An unknown error occured.
|
| WRONG_POINT_SIZE |
One or more points have a wrong size.
|
Definition at line 62 of file EstimateTransformation.hpp.
Constructor & Destructor Documentation
Constructs a new initialized instance of this class.
- Template Parameters:
-
| T | scalar type of the coordinates |
Definition at line 114 of file EstimateTransformation3D.hpp.
Member Function Documentation
Returns the root mean square (RMS) error of the estimated transformation.
- Template Parameters:
-
| T | scalar type of the coordinates |
It is assumed, that the computation was done before.
The value type T must provide a function T sqrt(T value) which yields the square root of value.
- Exceptions:
-
| ErrorObj | If the point sets do not have the same cardinality, an error object is thrown and its error code is set to UNEQUAL_NUMBER_OF_POINTS. |
- See also:
- compute()
Implements TRTK::EstimateTransformation< T >.
Definition at line 149 of file EstimateTransformation3D.hpp.
- Template Parameters:
-
| T | scalar type of the coordinates |
- Returns:
- Returns the sought transformation matrix in the form of a homogeneous 4x4 matrix. (This comprises the rotation as well as the translation, for instances.)
- See also:
- compute()
Definition at line 195 of file EstimateTransformation3D.hpp.
Sets the source points.
- Template Parameters:
-
| T | scalar type of the coordinates |
- Parameters:
-
| [in] | source_points | The points can either be plain 3D or 4D homogeneous coordinates. |
- Exceptions:
-
| ErrorObj | If there are any coordinates other than 3D or 4D coordinates, an error object is thrown and its error code is set to WRONG_POINT_SIZE. |
Definition at line 215 of file EstimateTransformation3D.hpp.
Sets the source points.
- Template Parameters:
-
| T | scalar type of the coordinates |
- Parameters:
-
| [in] | source_points | 3D coordinates. |
Definition at line 247 of file EstimateTransformation3D.hpp.
Sets the target points.
- Template Parameters:
-
| T | scalar type of the coordinates |
- Parameters:
-
| [in] | target_points | The points can either be plain 3D or 4D homogeneous coordinates. |
- Exceptions:
-
| ErrorObj | If there are any coordinates other than 3D or 4D coordinates, an error object is thrown and its error code is set to WRONG_POINT_SIZE. |
Definition at line 293 of file EstimateTransformation3D.hpp.
Sets the target points.
- Template Parameters:
-
| T | scalar type of the coordinates |
- Parameters:
-
| [in] | target_points | 3D coordinates. |
Definition at line 325 of file EstimateTransformation3D.hpp.
The documentation for this class was generated from the following file:
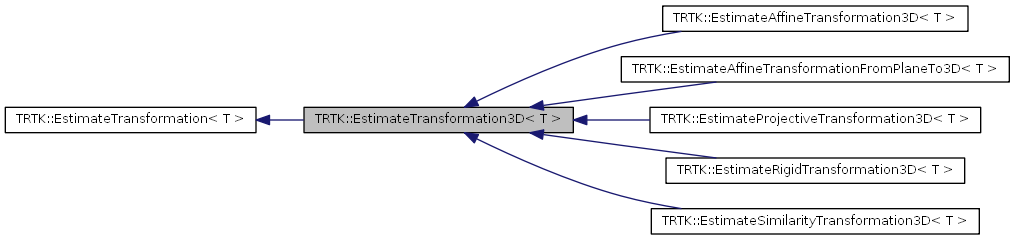
 Inheritance diagram for TRTK::EstimateTransformation3D< T >:
Inheritance diagram for TRTK::EstimateTransformation3D< T >: