Base class for all transformation estimations from two point sets. More...
#include <EstimateTransformation.hpp>
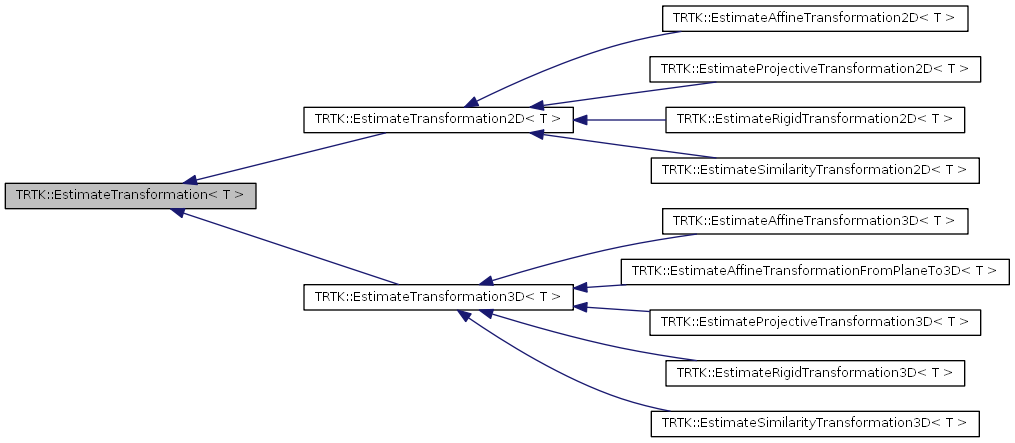
 Inheritance diagram for TRTK::EstimateTransformation< T >:
Inheritance diagram for TRTK::EstimateTransformation< T >:Public Types | |
| enum | Error { NOT_ENOUGH_POINTS, UNEQUAL_NUMBER_OF_POINTS, UNKNOWN_ERROR, WRONG_POINT_SIZE } |
|
typedef Eigen::Array< T, Eigen::Dynamic, 1 > | ArrayXT |
| General-purpose array of arbitrary size with value type T. | |
|
typedef Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | MatrixXT |
| Matrix of arbitrary size with value type T. | |
|
typedef Eigen::Matrix< T, Eigen::Dynamic, 1 > | VectorXT |
| Column vector of arbitrary size with value type T. | |
| typedef Eigen::Matrix< T, 2, 1 > | Vector2T |
| 2D column vector with value type T. | |
| typedef Eigen::Matrix< T, 3, 1 > | Vector3T |
| 3D column vector with value type T. | |
| typedef Eigen::Matrix< T, 4, 1 > | Vector4T |
| 4D column vector with value type T. | |
| typedef Eigen::Matrix< T, 1, 2 > | RowVector2T |
| 2D row vector with value type T. | |
| typedef Eigen::Matrix< T, 1, 3 > | RowVector3T |
| 3D row vector with value type T. | |
| typedef Eigen::Matrix< T, 2, 2 > | Matrix2T |
| 2 x 2 matrix with value type T. | |
| typedef Eigen::Matrix< T, 3, 3 > | Matrix3T |
| 3 x 3 matrix with value type T. | |
| typedef Eigen::Matrix< T, 4, 4 > | Matrix4T |
| 4 x 4 matrix with value type T. | |
Public Member Functions | |
| virtual | ~EstimateTransformation () |
| Destructor. | |
| virtual void | compute ()=0 |
| Performs the transformation estimation. | |
| virtual value_type | getRMS () const =0 |
| Returns the root mean square error of the estimated transformation. | |
Public Attributes | |
|
EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef T | value_type |
| Internally used value type (should be a floating point type). | |
Base class for all transformation estimations from two point sets.
Definition at line 43 of file EstimateTransformation.hpp.
| enum TRTK::EstimateTransformation::Error |
Definition at line 62 of file EstimateTransformation.hpp.
Documentation generated by Doxygen