This file contains the ICP class. More...
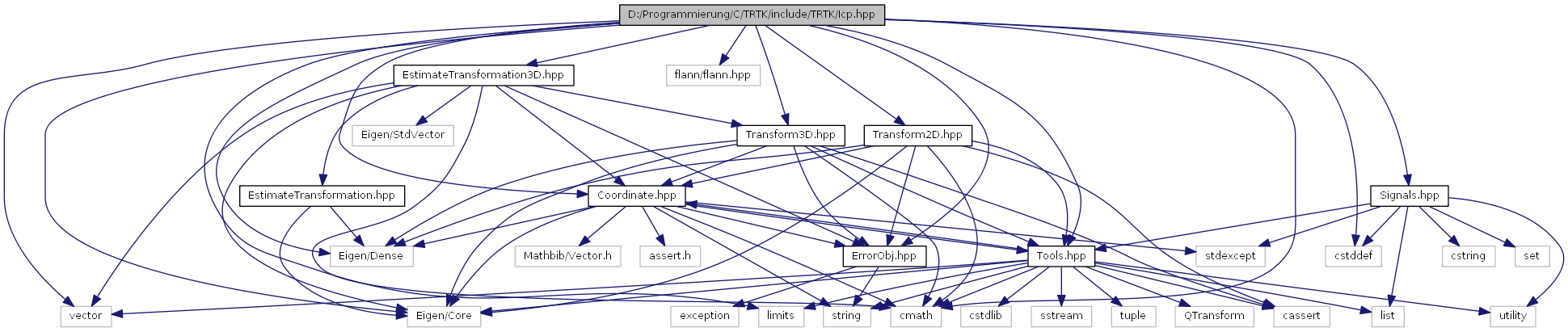
#include <cmath>#include <cstddef>#include <limits>#include <vector>#include <Eigen/Core>#include <Eigen/Dense>#include <flann/flann.hpp>#include "Coordinate.hpp"#include "ErrorObj.hpp"#include "EstimateTransformation3D.hpp"#include "Signals.hpp"#include "Tools.hpp"#include "Transform2D.hpp"#include "Transform3D.hpp" Include dependency graph for Icp.hpp:
Include dependency graph for Icp.hpp:Go to the source code of this file.
Classes | |
| class | TRTK::IcpInterface< ValueType > |
| Iterative Closest Point. More... | |
| class | TRTK::IcpBase< ValueType > |
| Base class for all ICP implementations. More... | |
| class | TRTK::Icp3D< ValueType > |
| ICP algorithm for 3D point clouds as described by Besl and McKay [1]. More... | |
| class | TRTK::IcpTrimmed3D< ValueType > |
| Trimmed ICP algorithm for 3D point clouds. More... | |
| class | TRTK::RandomSampleIcp3D< ValueType > |
| Random Sample ICP algorithm for 3D point clouds. More... | |
Namespaces | |
| namespace | TRTK |
Namespace of the Transformation and Registration Toolkit. | |
This file contains the ICP class.
Definition in file Icp.hpp.
Documentation generated by Doxygen